C#上位机通过TCP通讯与库卡机器人连接,可实时返回机器人各关节位置,返回位置可导出为.CSV文件; 通过上位机控制机器人,实现各关节单步运动及当前位置到给定坐标的点运动两种形式; 资源包括【KUKA端】、【PC端】...
”库卡(KUKA) TCP/IP通讯 机器人实时位置传输 机器人运动控制 C“ 的搜索结果
隔了相当长的一段时间,我又来写一下上位机C#利用TCP/IP和库卡机器人通讯的文章 上位机要想和库卡机器人通讯,首先要给机器人安装“ETHERNETKRL”这个软件,对,是给机器人安装。具体软件的安装以及初步通讯测试就...

上位机通过KUKA_TCP工具进行通信,使用了Modbus_tcp 以及TCP/IP协议通信,KUKA_TCP工具所有系统变量、全局变量、报警信息、IO都可以采集交互,通过网络远程启动停止复位程序。不需要安装其他包和模块。KUKA上位机...
C#上位机通过TCP通讯可以实现与库卡(KUKA)机器人的实时位置返回及运动控制。 首先,需要在C#上位机中建立一个TCP连接,通过库卡机器人的IP地址和指定的端口号进行通信。使用C#的Socket类可以轻松地创建TCP连接、发送...
运动控制
KUKA 机器人的初始化运行称为 BCO 运行。BCO 是 B lock coincidence (即程序段重合)的缩写。重合意为 “ 一致 ” 及 “ 时间 / 空间事件的会合 ”。在下列情况下要进行 BCO 运行: 选择程序 (例 1) 程序复位: ...
1、库卡机器人的运动类型2、PTP运动(1)PTP运动简要介绍PTP运动示意图同步运动PTP在一个PTP运动中,参与运动的轴中运动距离组长的被称之为主轴,在运行指令中它的速度无法被**定义。PTP高速运动示意图在以下这个V-T图...
厂家定义的所有库卡机器人坐标轴(A1...A6)作为有限制的旋转坐标轴(例如带有软限位)。对于某些应用,然而坐标轴 A4和 A6可以配制作为无限制的旋转坐标轴相应的设置在文件“$MACHINE.DAT”中进行。如果修改机器数据来...

展开全部坐标系是为确定机器人的位置和姿态而在机器人或空e68a84e8a2ad3231313335323631343130323136353331333433653937间上进行定义的位置指标系统。坐标系分为关节坐标系和直角坐标系。工业机器人可以相对于不同的...
原标题:实操:KUKA机器人创建工具坐标数据使用机器人示教器设定工具 图8-8通过一个固定参考点的工具坐标系的测量分为2步:首先确定工具坐标系的TCP点,然后确定工具坐标系的姿态如表8-7所示。表8-7 TCP的测量的步骤...
Kuka 坐标变换
前言 机器人的分类 超大型机器人:负载能力 1000 kg 以上 大型机器人:100-1000 kg / 10 m2 以上 中型机器人:10-100 kg / 1 –10 m2 小型机器人:0.1-10 kg / 0.1-1 m2 超小型机器人:0.1 kg 以下 / 0.1 m2 以下 ...
机器人的操作系统对实时性有较高要求,例如Windows和Linux等通用操作系统都不是实时操作系统,工业机器人有专用操作系统包括VxWorks(嵌入式实时操作系统)、Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台等...
原标题:库卡焊接机器人七大软件大合集焊接机器人是工业生产中常用的一类机器人,应用行业广泛。而库卡焊接机器人则是焊接机器人领域的佼佼者,无论是技术还是品牌知名度,都是业内的佼佼者。在这样的背景之下,库卡...
在工具坐标系中手动移动时,可根据之前所测工具的坐标方向移动机器人。因此,坐标系并非固定不变(例如:世界坐标系或基坐标系),而是由机器人引导。在此过程中,所有需要的机器人轴也会自行移动。哪些轴会自行...

KUKA机器人零点标定的具体方法
在以下这个V-T图中,显示高速模式下机器人的默认运动设定,在一个运动中的机器人的扭矩控制始终会被优化,并且它的速度始终防止扭矩超差。 (2)编辑PTP运动指令 编辑运动指令一 编辑运动指令二 编辑...
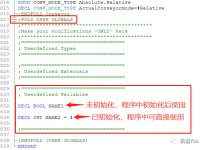
KUKA机器人运动指令 DECL KUKA机器人的资料网上太少了,KUKA的文档也写得有点绕,我决定把这块补齐,可能不够全面深入,但基本能用(欢迎指出不足)。刚入门的工程师查不到资料,那可太艹了。 可以转载,但一定要...
简单使用的上位机 ,有待改进请多多指教,参加INTEL杯写的第一版上位机

德系的工业机器人系统中,对于机器人停止运动,定义了3种模式,比如 KUKA 的工业机器人分别定义了 Stop 0 ,Stop 1,Stop 2 (*注1)。这种定义模式是与机器人的机械结构和电气结构相关联的。 对于此,读者应该先...
创建机制或机器人 按照以下步骤在RoboDK中创建新机制或机器人: 1。选择实用程序 ➔ 模型机制或机器人。 2。选择要创建的机制或机械手的类型。 3。选择代表机构原点的坐标系。 4。为每个关节选择一个对象(移动机构...
要通过代码导入程序到库卡工业机器人,您可以使用KUKA的专有软件和工具,如KUKASimPro、KUKAOfficeLite或KUKAWorkVisual。-在编写完程序后,通过模拟或虚拟机器人验证程序的正确性,以确保它符合您的要求。-在程序...
库卡工业机器人运动指令的入门知识问?学完了KUKA机器人的运动指令后,可以了解到哪些?答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作(2)通过学习PTP运动指令的添加方法,...
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地